ELAU PacDrive M EPAS-4
ELAU PacDrive M EPAS-4
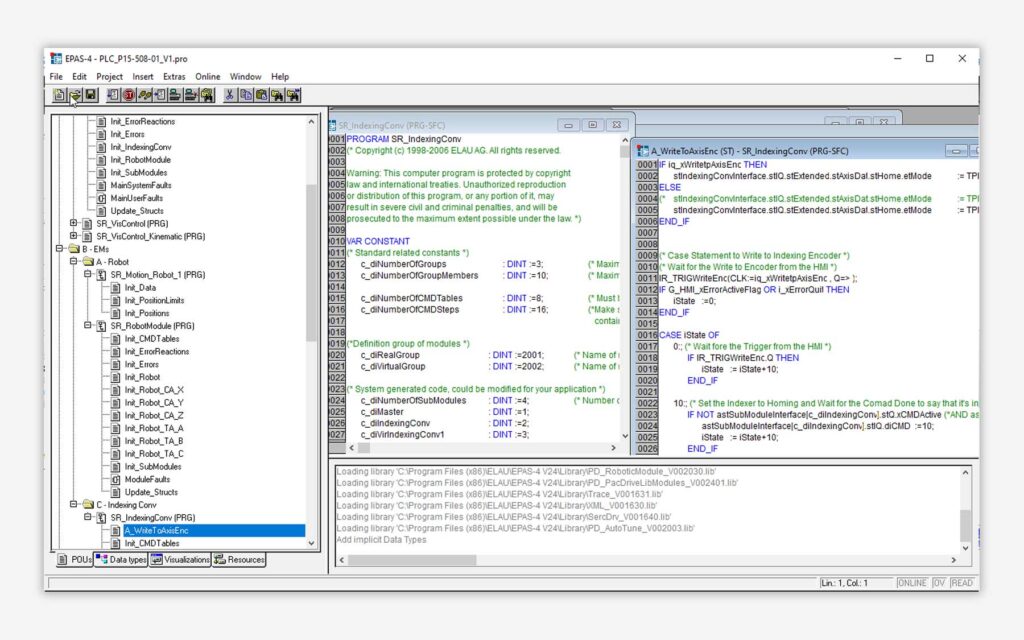
EPAS-4 ha funzioni e strumenti estesi e comprovati. Un vantaggio fondamentale di EPAS-4 è che tutti i componenti sono integrati e intuitivi.
Per te come utente, questo significa:
- Familiarizzazione rapida, facile gestione, tutti gli strumenti integrati.
- ELAU gestisce ampie librerie orientate al settore dell’imballaggio, aiutandoti a ottenere risposte rapide ed economiche. Possono anche aiutarti a migliorare la qualità dei tuoi programmi utente.
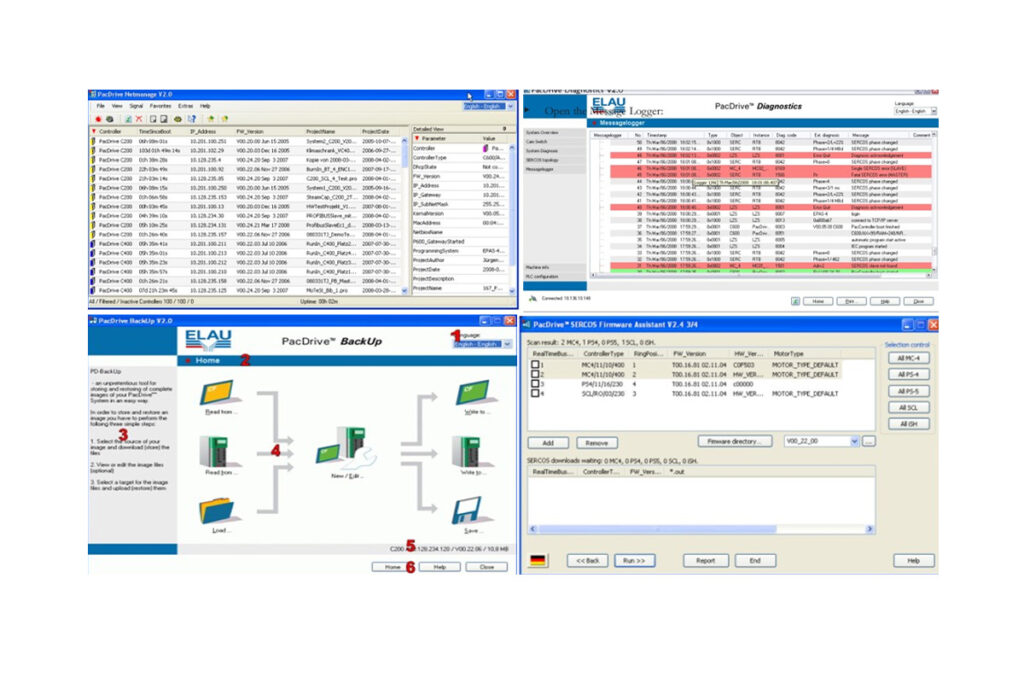
I punti salienti di EPAS-4 Automation Toolkit
- Funziona su Windows (a partire da Win95)
- Linguaggio di programmazione IEC 61131-3
- Strumento SCOPE (funzioni oscilloscopio)
- Strumento di diagnosi
- Funzioni di debug molto buone
- Connessione seriale o TCP/IP al Max-4 PacController
Verso la fine degli anni ’80, iniziò uno sviluppo che rese i controlli logici programmabili (PLC) componenti centrali della tecnologia di automazione. I sistemi PLC presentano vari vantaggi rispetto alla tecnologia a relè convenzionale, ad esempio possono essere regolati rapidamente in caso di modifiche di processo e sono facilmente estensibili. La funzione e la struttura dei sistemi sono indipendenti dalle dimensioni del PLC. Un PLC è costituito da hardware e software, con l’hardware che comprende un processore con componenti di archiviazione e ulteriore elettronica per la connessione di sistemi di input e output. I sistemi PLC modulari sono costituiti da vari componenti come supporti componenti con bus di sistema, unità di alimentazione, unità di elaborazione centrale e archiviazione dell’applicazione, input e output digitali e componenti intelligenti per l’elaborazione di dati analogici o il controllo dell’azionamento. Per il livello di input e output, è stata impostata una tensione standardizzata di 24 V che porta a una resistenza conforme ai requisiti del settore.
Il software comprende il sistema operativo e il programma applicativo. Il sistema operativo gestisce le risorse di sistema e le funzioni organizzative e, inoltre, assicura un avvio controllato dopo l’accensione della tensione di esercizio. È responsabile della gestione degli errori, consentendo lo scambio di informazioni tramite gruppi di comunicazione e coordina anche l’esecuzione del programma applicativo che mappa il corso logico del compito di controllo.
La semplice struttura di flusso mostra i suoi vantaggi quando i dati e i programmi vengono manipolati durante il funzionamento in corso. Quasi tutti gli ambienti di programmazione consentono la modifica di tutte le variabili durante un ciclo di elaborazione. Grazie alla struttura del programma impostata, le sequenze di programma possono essere caricate in fase di esecuzione (modifica online), poiché ci sono sempre punti di partenza esatti all’inizio e alla fine di un ciclo. Quando questi nuovi sistemi furono lanciati, i produttori dovettero far conoscere la programmazione dei nuovi sistemi ai loro clienti, che erano abituati ai contattori. Per questo motivo, furono fatti numerosi tentativi, per lo più di breve durata, per trovare un linguaggio di programmazione che facilitasse il passaggio dal tradizionale schema elettrico dettagliato al programma PLC. Furono quindi sviluppati i linguaggi di programmazione Function Block Diagram, Ladder Diagram e Instruction List. A quel tempo, tuttavia, gli sviluppatori non riuscirono a definire uno standard universalmente vincolante per la programmazione dei sistemi PLC. Di conseguenza, ogni produttore aveva caratteristiche specifiche nei linguaggi di programmazione Function Block Diagram, Ladder Diagram e Instruction List. Per questo motivo, in diverse aree geografiche sono nati standard aziendali, come ad esempio Siemens STEP 5 in Europa, Allen Bradley negli Stati Uniti e MITSUBISHI in Estremo Oriente.
IEC-61131
Negli ultimi anni, la complessità delle applicazioni e quindi i costi di programmazione sono cresciuti in modo sproporzionato. Gli standard specifici dei produttori non garantivano che i programmi potessero essere riutilizzati e per queste ragioni, all’inizio degli anni ’90, sotto la guida della Commissione elettrotecnica internazionale (IEC), è stato sviluppato lo standard IEC IEC 61131. Nel contesto di questo processo, sono stati definiti i nuovi linguaggi Structured Text (ST) e Sequential Function Chart (SFC) oltre ai linguaggi esistenti Ladder Diagram (LD), Function Block Diagram (FBD) e Instruction List (IL). IEC 61131 riassume i requisiti per un moderno sistema PLC. Lo standard non era inteso come una specifica rigida, ma come una linea guida per la programmazione PLC. Di conseguenza, lo standard descrive le proprietà significative di un PLC lasciando ai produttori abbastanza spazio per utilizzare la propria implementazione. IEC-61131 ha cercato di portare l’ingegneria del software moderna nel mondo dei PLC, il che era necessario a causa di processi e funzioni più complessi e dell’esplosione dei costi di sviluppo dei programmi applicativi. Moduli software testati e standardizzati che possono essere riutilizzati sono stati considerati una soluzione, tuttavia, ciò è reso più complicato da:
- indirizzamento diretto
- variabili non tipizzate,
- nessun controllo di tipo.
In generale, gli obiettivi di IEC 61131 sono:
- applicazione di metodi di ingegneria del software con l’obiettivo di moduli software riutilizzabili
- approccio olistico alle soluzioni dei problemi
- astrazione di attività complesse in moduli più piccoli
- definizione di interfacce univoche
- standardizzazione dell’ambito del linguaggio per aumentare la portabilità.
Oltre agli elementi per la programmazione e l’organizzazione del programma applicativo, IEC 61131 fornisce anche linee guida per la modellazione e la strutturazione di sistemi compositi PLC. Per strutturare il sistema, sono stati introdotti i concetti di configurazione e risorsa. Il modello prende in considerazione anche proprietà quali sistemi multiprocessore, moderni sistemi operativi PLC con proprietà multitasking, numero illimitato di ingressi e uscite analogici e digitali e la capacità di comunicare con altri PLC e computer. Una configurazione definisce la struttura di un sistema, ad esempio, può essere un PLC con diverse CPU, anche in rete, a livello di cella macchina. Una configurazione è composta da una o più risorse che rappresentano sottocontrolli con le proprie funzioni di elaborazione del segnale. In una configurazione reale, una risorsa è rappresentata da una CPU PLC, che nella maggior parte dei casi ha capacità multitasking. Una risorsa è strutturata con l’aiuto di uno o più programmi che sono controllati tramite task. Un task è un’unità di programma eseguibile a cui sono assegnati sia una priorità che un tipo di esecuzione. Pertanto, linee di esecuzione con proprietà diverse possono essere formulate all’interno di uno stesso programma. Pertanto, non sono possibili solo task ciclici con un tempo di ciclo uniforme in tutto il sistema. I tempi di ciclo possono anche essere combinati e le unità di programma controllate dagli eventi possono essere rese disponibili nel sistema. Assegnando una certa priorità a un task, il tempo di CPU viene assegnato a una risorsa.
Le proprietà di runtime del programma completo, che può essere eseguito indipendentemente in una CPU, sono definite collegando i programmi a un determinato task. Grazie alla flessibilità della modulazione di sistema, un programma può essere collegato a più task, creando così più istanze con diverse proprietà di runtime. IEC 61131-3 supporta dati locali che possono essere dichiarati in programmi, blocchi funzione o funzioni. I dati locali sono accessibili solo nel corrispondente livello di gerarchia del programma e rappresentano un meccanismo per l’incapsulamento dei dati. Naturalmente sono possibili anche dati globali disponibili per tutte le risorse disponibili per tutti gli elementi del programma. Se vengono utilizzati sistemi multitasking, tuttavia, l’accesso ai dati globali è una fonte di rischio per dati incoerenti. Inoltre, ci sono dati direttamente accessibili con indirizzi fissi all’interno dell’intervallo di indirizzi PLC.
Un aspetto essenziale nella descrizione degli elementi strutturali è lo scambio di dati. Con l’aiuto del modello di comunicazione definito nella IEC 61131, è possibile creare programmi PLC ben strutturati e in particolare modularizzati, che è una caratteristica di base fondamentale per lo sviluppo di moduli di programma riutilizzabili e orientati all’applicazione. In linea di principio, la IEC 61131 prevede le seguenti possibilità di comunicazione:
percorsi di accesso (VAR_ACCESS)
- variabili globali (VAR_GLOBAL, VAR_EXTERNAL)
- parametri di chiamata
- moduli di comunicazione (IEC 61131-5)
Tutti gli elementi di una configurazione comunicano tra loro e anche con altri sistemi informatici esclusivamente tramite percorsi di accesso definiti. Inoltre, le variabili globali vengono utilizzate per la semplice comunicazione di programmi all’interno di una configurazione. Le variabili globali possono essere posizionate e utilizzate a livello di configurazione, risorsa e programma. Lo scambio di dati all’interno dei programmi viene effettuato tramite parametri di chiamata, variabili di input e output o valori di funzione. Sebbene i programmatori di linguaggi di alto livello abbiano familiarità con questo strumento strutturale, ha introdotto aspetti fondamentalmente nuovi nella programmazione PLC convenzionale. I parametri di chiamata e le variabili di trasferimento consentono la definizione di interfacce univoche e quindi forniscono un contributo importante all’incapsulamento della funzionalità. Oltre agli elementi del modello di comunicazione descritti finora, possono essere utilizzati anche speciali “moduli di comunicazione”. Sono di natura monolitica e sono collegati in un programma. Grazie a tali moduli, lo scambio di dati tra mittente e destinatario è autosufficiente. I servizi di comunicazione sono definiti nella parte 5 di IEC 1131, che è ancora in fase di modifica, tuttavia, guardando il modello di comunicazione di IEC 1131, il buon supporto dei moduli software standardizzati è particolarmente sorprendente. Grazie all’incapsulamento di funzionalità e dati, a un’interfaccia chiaramente definita e a un comportamento privo di effetti collaterali, l’accettazione dei moduli da parte degli utenti è aumentata notevolmente.
Un’importante standardizzazione dei linguaggi di programmazione secondo IEC 61131-3 è la definizione dei tipi di dati. La norma include vari tipi di dati elementari da cui possono essere composti tipi di dati derivati e definiti dall’utente. L’utente può utilizzare tipi di dati standard e tipi di dati autodefiniti per la programmazione. A ciascun identificatore è assegnato un tipo di dati che definisce quanto spazio di memoria è riservato e quali valori corrispondono al contenuto della memoria.
Contattaci per il supporto Schneider Electric PacDrive:
Ripara. Sostituisci. Addestra. Mantieni. Il tuo ONE STOP SHOP per le tue esigenze ELAU PacDrive. Ora e in futuro.